- 29 active degrees of freedom (DOF)
- Two 6 DOF force controlled arms using Series Elastic Actuators (SEA)
- Two 6 DOF force controlled hands using SEAs
- A 2 DOF force controlled neck using SEAs
- Stereo pair of Point Grey Firewire CCD cameras
- Stereo Videre STH-DCSG-VAR-C Firewire cameras
- Intersense 3 axis gyroscope
- Two 4 DOF hands using Force Sensing Compliant (FSC) actuators
- Embedded brushless and brushed DC motor drivers
- 5 Embedded Motorola 56F807 DSPs running a 1khz control loop
- 4 CANBus channels providing 100hz communication to external computation.
- 49 potentiometers, 7 encoders, 24 tactile sensors, 12 brushless amplifiers, 17 brushed amplifiers, 12 sensor conditioners embedded on-board
- An estimated 500 fabricated mechanical components and 60 electronics PCBs
- 15 node [and growing] Debian Linux cluster running a mixture of C/C++/Python and utilizing the Yarp and pysense robot libraries.
- Weight: 42lbs. Height: 34" tall. Arm span: 5' 6"
NEW: Our work with Domo has lead to the creation of the robotics companies HeeHeeHee Labs and Meka Robotics.
The Phd dissertation, "Robot Manipulation in Human Environments", is now available PDF, as well as the slides from the dissertation talk, in HTML and PDF.
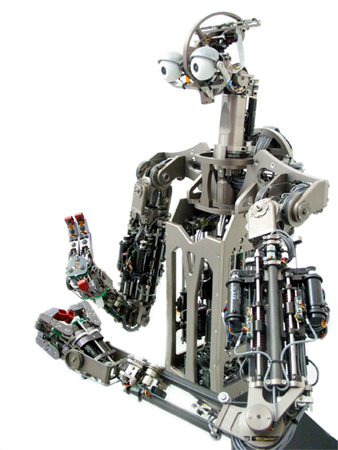
Domo is a new upper-torso humanoid robot at the MIT CSAIL Humanoid Robotics Lab. It is the doctoral work of Aaron Edsinger. The goal of Domo is to contribute a novel approach to robot manipulation in unstructured environments. The approach is centered on integrating compliant and force sensitive manipulators into a behavior based architecture that accomplishes useful manipulation tasks in human environments.
The mechanical design is the work of Aaron Edsinger and long time collaborator Jeff Weber. Be sure to visit his site for technical details on the mechanics. The head is a copy of a design done by Weber for the robot Mertz. The visual system builds on the work ofCharlie Kemp with the wearable Duo. The design and construction took approximately one year and many sleepless nights.
This research is advised by Professor Rodney Brooks, Director of the MIT CSAIL, and is sponsored by Toyota Motor Corporationand NASA.
The Phd dissertation, "Robot Manipulation in Human Environments", is now available PDF, as well as the slides from the dissertation talk, in HTML and PDF.
Domo is a new upper-torso humanoid robot at the MIT CSAIL Humanoid Robotics Lab. It is the doctoral work of Aaron Edsinger. The goal of Domo is to contribute a novel approach to robot manipulation in unstructured environments. The approach is centered on integrating compliant and force sensitive manipulators into a behavior based architecture that accomplishes useful manipulation tasks in human environments.
The mechanical design is the work of Aaron Edsinger and long time collaborator Jeff Weber. Be sure to visit his site for technical details on the mechanics. The head is a copy of a design done by Weber for the robot Mertz. The visual system builds on the work ofCharlie Kemp with the wearable Duo. The design and construction took approximately one year and many sleepless nights.
This research is advised by Professor Rodney Brooks, Director of the MIT CSAIL, and is sponsored by Toyota Motor Corporationand NASA.
No comments:
Post a Comment